If you have already Configured and Enabled the RossTalk Plugin, you can start receiving messages in your Voyager Blueprints.
- Add a RossTalk GPI or RossTalk CC Event Node to your Blueprint.
- Connect its Input Exec Pin to the Event BeginPlay event.
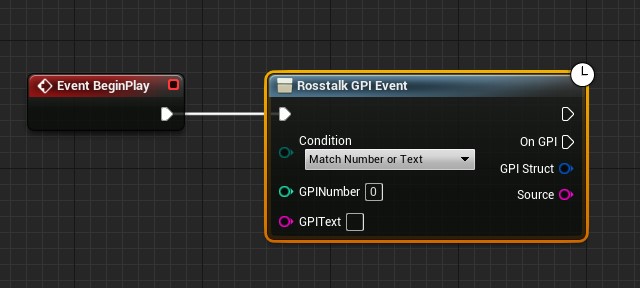
Input Parameters
The Condition parameter is to define if this GPI event will be fired when the GPI Number parameter matches the incoming GPI command (parsed as a number), and/or the GPI Text parameter matches the incoming messages as a Text.
The Condition -> Any GPI command will trigger the RossTalk GPI Event regardless of the incoming command GPI value.
Output
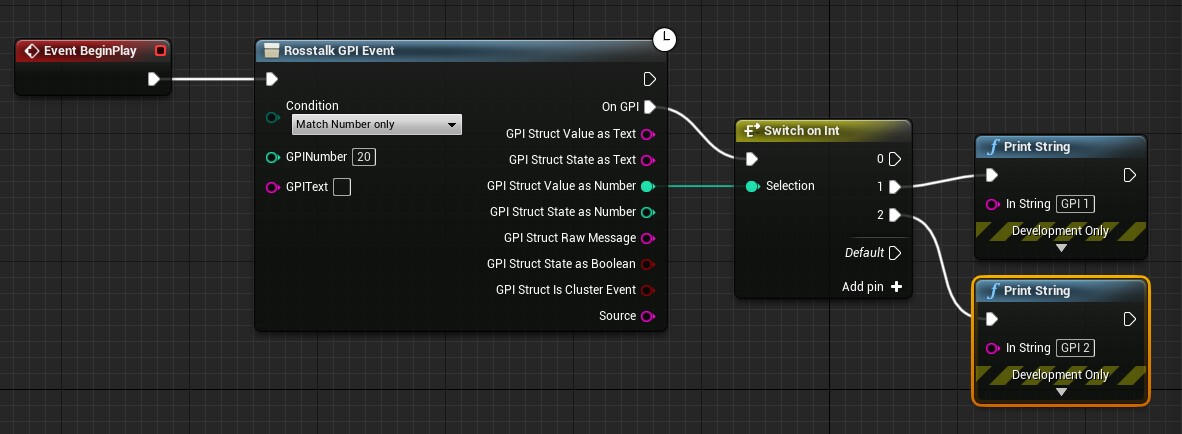
- The On GPI execution pin will be fired when the corresponding RossTalk GPI message is received.
- The GPI Struct output value contains a structure with the parsed values of the GPI messages:
- As Text, mainly useful to support sending any custom messages.
- Value as Text returns the raw text string of the GPI value field
- State as Text returns the raw text string of the GPI Sate field
- As Number, mainly useful for simple number-based scripting like "Switch on Int"
- Value as Number returns the GPI value field parsed as an integer number.
- State as Number returns the GPI state field parsed as an integer number.
- Raw Message returns the full raw incoming RossTalk message
- State as Boolean returns a true/false representation of the State field, that can be useful for boolean comparisons.
- "0" state will return false
- "1" state will return true.
- Is Cluster Event will return true if the RossTalk Event has been triggered from an nDisplay Cluster Event. Will return false when using Voyager in normal usage.
- Source will return the IP address of the origin endpoint where the RossTalk command was sent from. This could be useful for additional security measurements, login, or even differentiating the behavior of the RossTalk node depending on its origin.
- As Text, mainly useful to support sending any custom messages.